工程地址 ![]() GitHub https://github.com/marktlen/three_omni
GitHub https://github.com/marktlen/three_omni
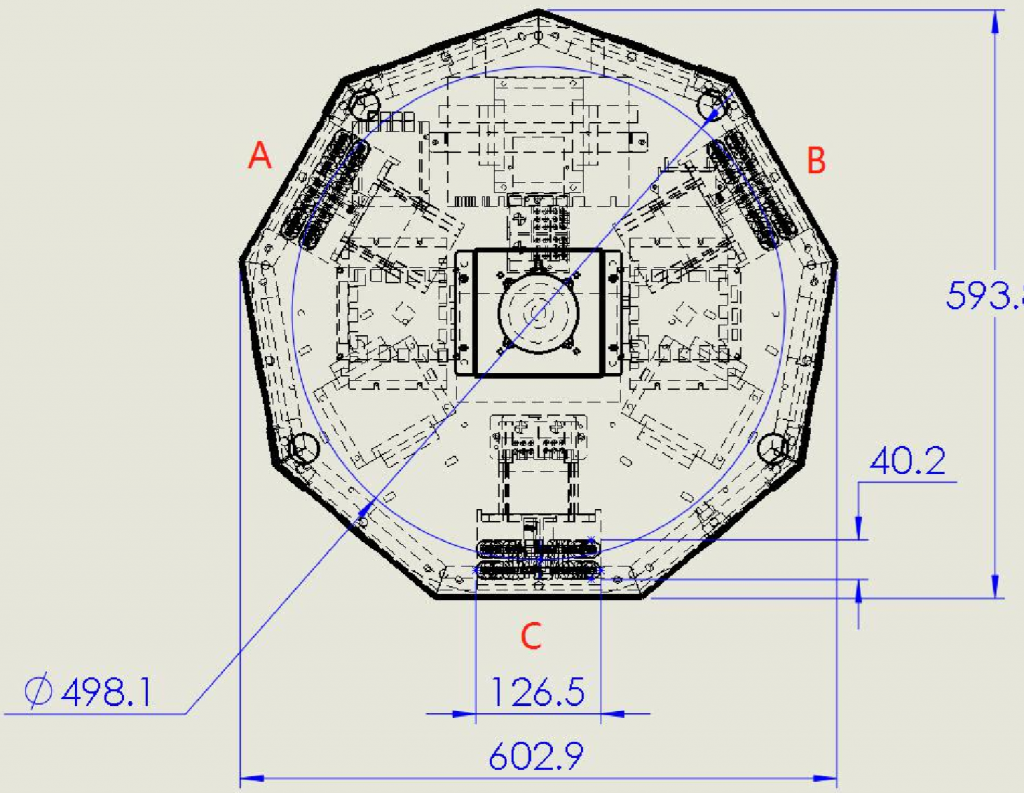
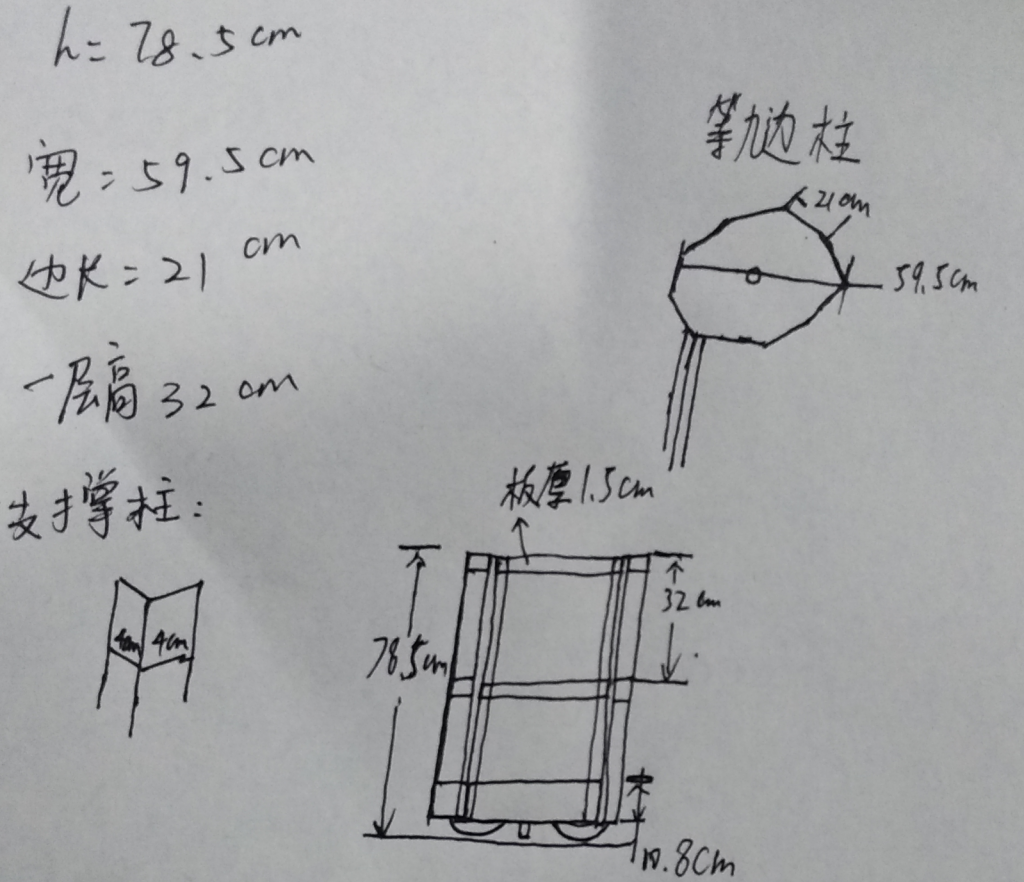
底盘参数和手动测量
运动学分析参考文档及全向轮SLAM相关工程
三轮全向轮底盘 运动学模型分析:
三轮控制通信协议更新至v0.2
理解麦克纳姆轮和全向轮的动力学原理
Modern Robotics, Chapter 13.2: Omnidirectional Wheeled Mobile Robots (Part 1 of 2)
配置修改部分:
在rplidar_ros包里面把src/node.cpp 里面的range_min 改成小车半径(0.59),过滤掉车体对建图的影响
需要对gazebo进行升级,并确认版本为7.0以上,推荐7.9
$ sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
$ wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
$ sudo apt-get update
$ sudo apt-get install gazebo7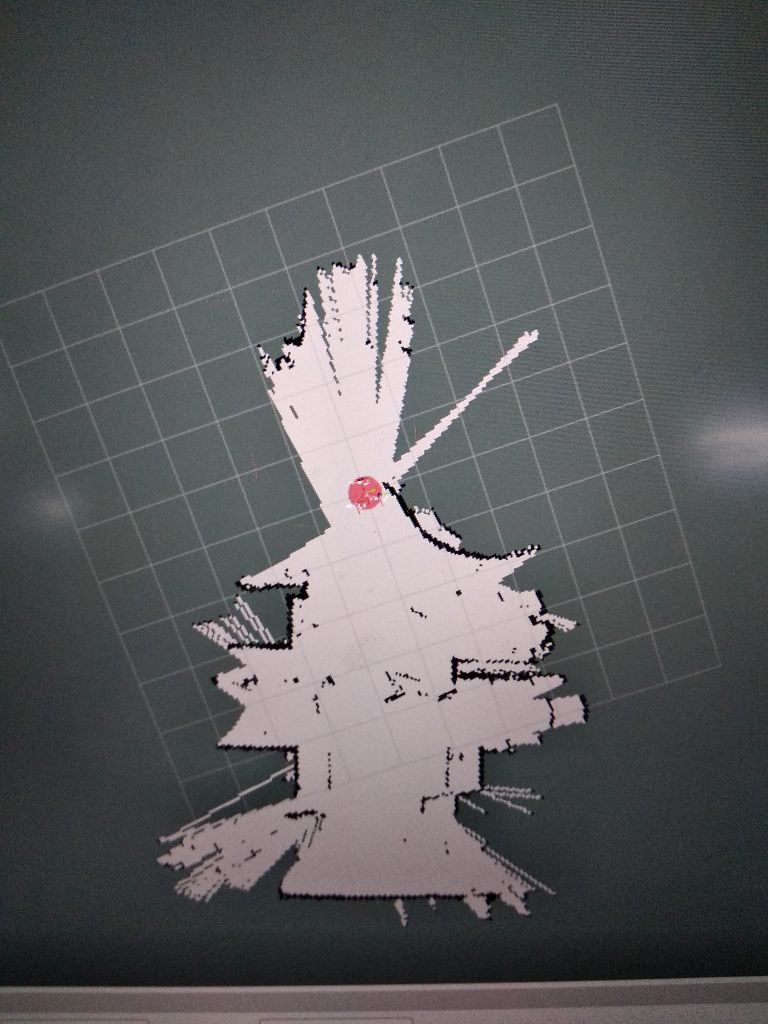
目前未解决的问题
- 存在激光雷达超时数据量过大时,TF会暴毙的问题
- 底盘与里程计转换程序无法添加到launch文件中
- Odom坐标需要键盘控制程序赋予一个初始值